Color Segmentation¶
| date: | Aug 31, 2006 |
|---|
What is color segmentation and why do it?¶
There is an entire industry devoted to the problem of searching images in a large collection of images. These are typically images of scenes taken with a camera, rather than drawings or other composed images. The query protocol for the search is typically to choose some image and request “all images that are similar.” A related problem is to place each image in the collection into a subset of similar images, doing some type of unsupervised classification. These operations require the ability to calculate a meaningful “distance” between two images. Unsupervised classification follows a simple algorithm. Given a distance function and a threshold, each image is sequentially placed either into an existing class or starts a new class, depending on the distance of that image from the representatives of each existing class. The first image to start each class is the representative for the class, at least on the first iteration. There may be subsequent iterations where the parameters of the classes are averaged to find a “center” for each class in the parameter space.
How is the distance between images determined? That’s the hard part — there’s no obvious way. In fact, for two-dimensional images, there are very few distance metrics (satisfying the triangle inequality) that have been found. One of them is the Hausdorff metric, which we use for classification of binary shapes; e.g., see Jbig2 image compressing. For color images, no useful metric distance is known.
IBM had a big R&D program called “Query By Image Content,” or QBIC for short. None of the published methods work very well, so it continues to be an “interesting” problem to academics. Image search works much better if there is some text associated with the images: you do a text search and don’t bother about the pixels in the image. After an initial fanfare, IBM seemed to give up on the QBIC project near the end of the last century.
But if you wanted to write a QBIC program, what parameters would you choose? Intuitively, you want to include both color and shape information. Images of natural scenes usually have many colors and complicated shapes. So the first logical step would be to simplify both the colors and the shapes. Once that is done, you still have the difficult problem of finding a good way to use your simplified colors and shapes to generate a meaningful “distance.” The color segmentation in Leptonica tackles the easy part: finding regions of significant size and nearly uniform color. We offer it as a starting point for any QBIC-like image search application.
There are other reasonable approaches to this problem, notably involving textures. Rather than smoothing out regions and looking for a few representative colors, you can identify regular or irregular patterns of colored shapes. Textures are sufficiently varied that taxonomies are non-trivial and somewhat arbitrary. A possible implementation would omit the smoothing step (described below), and would select binary textures formed by assigning fg and bg to two specific colors. For N colors, there are N(N-1)/2 color pairs, and for small N (say, less than 8) a search of all pairs is feasable. We won’t pursue this any further here, but we do use textures implicitly in morphological analysis of document images, for segmentation.
How does color segmentation differ from color quantization?¶
The purpose of color quantization is to generate an approximation to the original image with a smaller palette of colors. If there is a relatively small number of colors, without a high frequency pattern such as halftoning, such an image will compress very well losslessly, often much better than with lossy compression such as jpeg, where a fine-grained set of RGB colors is used. In Leptonica we use octcube partitioning and octree indexing because it allows fast color quantization with arbitrary color accuracy. For best accuracy, an octree that represents the most important colors is combined with error-diffusion dithering to approximate the original colors accurately in each small region of the image. However, dithered images do not compress well losslessly.
In color segmentation, fidelity to the original image is not a goal. Instead, you want a small set of regions, of significant extent and with smooth boundaries, each of which is of a uniform color, and with a relatively small total number of colors in the image. We want the few resulting colors to be the best representative of each subset of pixels. The result is an image that has been “simplified,” both in colors and shapes. As will be shown, octcube indexing can be used to accelerate some steps of the classification process. Although it’s not important for the application, color segmented images have excellent lossless compression.
How do we generate the color segmented images?¶
The best description of the method used here is the code itself (colorseg.c). The top-level function, pixColorSegment(), has four parameters, of which two — the smoothing parameter and the number of final colors — are the most important. The other two parameters could be generated programmatically, but an argument can be made to keep them for experimentation. One of these parameters is the maximum number of colors to be quantized in the first phase, and as a rough guide, this should be at least twice the final number of colors. The other parameter is the initial guess for the threshold euclidean distance for determining if a color belongs to an existing class. This distance is related to the radius of the resulting clusters, which is related to the maximum number of clusters that will be found in the RGB space. Guidelines are also given for the relation between the input euclidean distance and the maximum number of clusters.
The process has four phases:
Greedy, unsupervised classification. This is an iterative procedure. We start with the threshold cluster radius and the maximum number of colors. Pixels are taken in raster order. The first pixel becomes the representative for the first cluster. Successive pixels are assigned to this or other existing clusters, or become representatives for new clusters. If the maxcolors limit is exceeded, the threshold radius is increased by a multiplicative constant and the process is repeated, until a cluster assignment is made that obeys the maxcolors constraint. The average cluster color is computed during accumulation.
Reclassification using the cluster averages. Each pixel is re-assigned to the cluster whose average color is closest to the pixel color. This improves the assignment. The cluster averages are stored in a colormap. We make the time to compute the assignment independent of the number of pixel clusters, by constructing an octcube in RGB space and assigning to each cube the nearest color in the colormap. Then for each pixel, we use table-lookup twice: first to find the index of the containing octcube, and second to find the nearest color in the colormap to that octcube. We also keep track of the number of pixels assigned to each cluster.
Smoothing regions and boundaries. Starting with the color cluster with the most pixels, we generate a binary mask where those pixels are fg and all other pixels are bg. Then do a closing with a Sel size given by the smoothing parameter. Xor the result with the initial mask to find the new pixels to be assigned to this color, and reassign them. Repeat for all colors.
Reduce the number of colors to the input ‘finalcolors’. Identify all the pixels that are not in the most populated color clusters, by building a binary mask over them. Assign all these pixels temporarily to one of the color clusters that will be saved. Then remove unused colors from the colormap. This does a compression of the colormap, causing a reassignment of the pixel values (which are just the colormap indices). Finally, reassign all the pixels under the mask to their closest color in the colormap. We can use the same function from the second phase to do this, except this time we only reassign the masked pixels.
How does a color segmented image look?¶
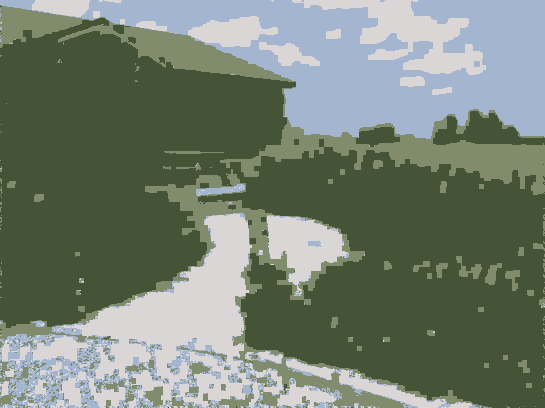
Here is a fairly busy image:

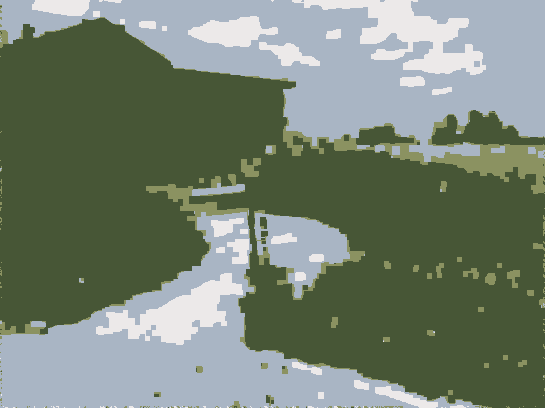
Suppose we want finalcolors = 4, and we use a 5x5 Sel for smoothing. The rule-of-thumb says to choose maxcolors = 8 (approximately), and we get:
This isn’t bad for using only four colors in the final result. If we choose maxcolors = 4, the result is more random in the final assignment:
whereas going to the other extreme, starting with maxcolors = 16, the result is very noisy:
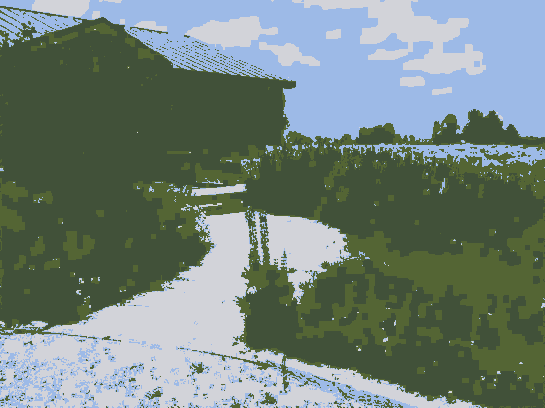
This is due to the fact that the smoothing step in phase 3 was performed with many colors, and hence was relatively ineffective. Then in phase 4, many of the pixels were reassigned based on color rather than proximity. This suggests that we should perhaps reduce the number of colors to the final value before smoothing. I will leave it to the users of the library to experiment further. Please let me know when you get some interesting results, and I will post them here.
- “Unofficial” Leptonica Documentation Release Notes
- The Leptonica Image Processing Library
- README
- Version Notes for Leptonica
- Source Code and Information
- Source Downloads
- Overview of the Leptonica Library
- Supplemental Notes on Using the Library
- Leptonica API
- /src Directory Contents (API Implementation)
- /prog Directory Contents (Examples)
- Image Processing Operations
- Image Processing Applications
- Byte Addressing for Efficiency and Portability
- What is “Well-Tested” C Code?
- Some Issues in Software Design
- Selected Papers on Image Processing and Image Analysis
- About the Copyright License
- What is the Significance of the Name “leptonica”?
- Glossary
- Leptonica & Visual Studio 2008
- Other Topics
